Hobbywing Platinum Pro 200A HV Handleiding
Hobbywing
Radiografisch bestuurbaar speelgoed
Platinum Pro 200A HV
Lees hieronder de 📖 handleiding in het Nederlandse voor Hobbywing Platinum Pro 200A HV (1 pagina's) in de categorie Radiografisch bestuurbaar speelgoed. Deze handleiding was nuttig voor 59 personen en werd door 2 gebruikers gemiddeld met 4.5 sterren beoordeeld
Pagina 1/1
Fixed WingFlight Mode1
Parameters Values Option 1 Option 2 Option 3 Option 4
Helicopter
(Linear Throttle/
External Governor)
2
3
5
6
7
8
9
10
11
12
13
14
16
LiPo Cells
Voltage Cutoff Type
BEC Voltage
Response Time
Governor Parameter P
Governor Parameter I
Auto Restart Time
Restart Acceleration Time
Brake Type
Brake Force
Timing
Motor Rotation
Start-up Force
*Auto Calculation
*Soft Cutoff
5-8V Default:7.4V( )
0-21 (Default:15)
0-9 (Default: 4)
0-9 (Default: 5)
0-90s (Default: 25s)
1-3s (Default: 1.5s)
* Disabled
0-100% (Default: 0%)
0°-30° (Default: 15°)
*CW
1-7 (Default: 3)
6~14S
Hard Cutof
Normal
CCW
Proportional
2.8V-3.8V
(Default: 3.0V)
DisabledCutoff Voltage4
Helicopter
(Elf Governor)
Helicopter
(Store Governor)
DEO Technology
/Freewheeling *Enabled Disabled15
04
User Guide
03
Specifications
02
Features
01
Warnings
05
ESC Programming & Data Checking
06
Programmable Parameters & Explanations
07
Speed-governing Function
08
Warning Tones & Protections
Wiring
CA UT IONS
Thank you for purchasing this HOBBYWING product! Please read this declaration carefully
before use, once you starts to use, we will assume that you have read and agreed with all the
content. Brushless power systems can be very dangerous and any improper use may cause
personal injury and damage to the product and related devices, so please strictly follow the
instruction during installation and use. Because we have no control over the use, installation,
or maintenance of this product, no liability may be assumed for any damage or losses resulting
from the use of the product. We do not assume responsibility for any losses caused by
unauthorized modifications to our product. Besides, we have the right to modify our product
design, appearance, features and usage requirements without notification. We, HOBBYWING,
are only responsible for our product cost and nothing else as result of using our product.
Regarding the possible semantic difference between two different versions of declaration, for
users in mainland China, please take the Chinese version as standard; for users in other
regions, please take the English version as standard.
AT T ENT ION
1
Normal Start-up Process
2
Explanation for ESC Speed-governing
1
Trouble
The input voltage is abnormal.
The throttle signal is lost.
The throttle stick is not moved to the bottom position.
The throttle range is too narrow.
The ESC thermal protection is activated.
The low-voltage cutoff protection is activated.
The over-current protection is activated.
Warning Tone
“BB, BB, BB, ...”
“B-, B-, B-, ...”
“B, B, B, ...”
“B, B, B, ...”
No
No
No
LED Status
(Along with the beeps,) the Red LED flashes.
Along with the beeps,) the Red LED flashes.
Along with the beeps,) the Red LED flashes.
Along with the beeps,) the Red LED flashes.
The Blue LED flashes a short, single flash that repeats.
The Blue LED flashes a short, double flash that repeats.
The Red LED turns on solid.
Cause
The input voltage is not within the regulated range.
The ESC doesn’t detect any throttle signal input.
The ESC detects that the throttle is above 0%.
You set the throttle range too narrow during the ESC/Radio Calibration.
The internal temperature of the ESC goes above the regulated temperature range.
The operating voltage goes below the preset cutoff voltage.
The operating current goes above the regulated value.
(1) There are four flight modes available for the ESC, please refer to the following form to check the
programmable items under each mode.
Fixed-wingFlight Mode Helicopter
(External Governor)
Helicopter
(Elf Governor)
Helicopter
(Store Governor)
LiPo Cells
Voltage Cutoff Type
Cutoff Voltage
BEC Voltage
Governor Parameter P
Governor Parameter I
Auto Restart Time
Restart Acceleration Time
Brake Type
Brake Force
Timing
Motor Rotation
Start-up Force
Adjustable
Adjustable
Adjustable
Adjustable
N/A
N/A
N/A
N/A
N/A
N/A
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
N/A
N/A
N/A
N/A
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
N/A
N/A
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
Adjustable
N/A
N/A
Adjustable
Adjustable
Adjustable
Adjustable Adjustable AdjustableResponse Time It turns to “Soft
Start-up Enabled/Disabled”
DEO Technology
/Freewheeling Adjustable Adjustable Not Adjustable
(Default: Enabled)
Not Adjustable
(Default: Enabled)
(2) Programmable Parameters & Parameter Values. (“*” in the form below indicate factory defaults. )
USER MANUAL
Platinum HV 200A SBEC V4.1
Platinum HV 200A OPTO V4.1
Brushless Electronic Speed Controller
Turn on the transmitter, and then
move the throttle stick to the
bottom position.
After connecting the ESC to a battery,
the motor will emit “ 123” to ♪
indicate it’s powered on normally.
The motor will emit a number of beeps to indicate the the
number of LiPo cells that you have been plugged in (a long
beep indicates a 5s LiPo, a short beep represents a 1S LiPo.)
The motor will emit a long
beep to indicate the system
is ready to go.
• Read through the manuals of all power devices and aircraft and ensure the power configuration is rational before using this unit, as improper power configuration will overload the motor and damage the unit.
• When installing this unit, relevant operations like soldering, connecting will be needed, so please ensure all wires and connections are well insulated before connecting the unit to related devices, as short circuit will damage the unit.
When soldering relevant wires of the unit, please use a soldering iron with sufficient power to do the soldering, as poor connection may cause your aircraft to lose control or other unpredictable issues like damage to the device.
• Always keep your aircraft away from unsafe elements like obstacles, crowd, high-voltage power lines. Please fly your aircraft in the working environment as regulated in this manual. Although there are some protections, improper use may
still cause permanent damage to the product.
• Always disconnect and remove batteries after use, as the ESC may drive the motor to rotate and cause unpredictable danger if it`s still connected to the battery. Long-time contact will cause the battery to completely discharge and result in
damage to the battery or/and the ESC. This will not be covered under warranty.
1. Flight Mode
• Fixed-wing: in this mode, the motor only starts up when the throttle amount reaches 5% or above and it responds to the throttle input rapidly.
• Helicopter (Linear Throttle/External Governor): this mode is applicable to helicopters which do not use any kind of speed-governing devices or helicopters which use external governors . If you select this mode, then the “Response
Time” will turn to “Soft Start-up Enabled/Disabled”. In this mode, the motor only starts up when the throttle amount reaches 5% or above; and it will run in either way:
1) when setting to “Soft Start-up Enabled” (with the Response Time is set to any value between 1 and 21), the motor will start up in a soft way and then quickly accelerate to the speed corresponds to the current throttle amount after
the soft start-up completes.
2) when setting to “Soft Start-up Disabled” (with the Response Time is set to 0), then there will be no soft start-up and the motor will respond to the throttle input rapidly.
Regarding “Soft Start-up Enabled/Disabled”:
Please set it to “Soft Start-up Enabled” when not using any speed-governing device;
Please set it to “Soft Start-up Disabled” when using an external speed-governing device (i.e. gyro) to avoid it conflicts with the soft start-up function of the external speed-gover ning device. Meanwhile, please set the “DEO
Technology/Freewheeling” to “Disabled”.
• Helicopter (Elf Governor): in this mode, the motor only starts up when the throttle amount reaches 40% or above; the motor will start up in a very soft way, (the RPM standardization will complete during this process,) and enter the
speed-governing operation after the RPM gets stable.
• Helicopter (Store Governor): in this mode, the motor only starts up when the throttle amount reaches 40% or above; the motor will start up in a very soft way and enters the speed-governing operation after the soft start-up
completes and the RPM gets stable. Every time when adjusting the flight mode from any other mode to this mode, you need to standardize the RPM, otherwise the speed-governing function cannot function normally. If your ESC
remains in this mode in future, then you won’t need to standardize the RPM again.
2. LiPo Cells
The ESC will automatically calculate the number of LiPo cells you have plugged in as per the “3.7V/Cell” rule if “Auto Calc.” is selected; and we recommend setting this item manually when you’re using a LiFe or LiHV battery.
3. Voltage Cutoff Type
Soft Cutoff: if this item is selected, the ESC will gradually reduce the output to 50% of the full power when the voltage cutoff protection is activated.
Hard Cutoff: if this item is selected, the ESC will cut off the output immediately when the voltage cutoff protection is activated.
4. Cutoff Voltage
This item is adjustable between 2.8V and 3.8V with the step of 0.1, it’s 3.0V by default. It is the voltage of one cell, if you’re using a 6S LiPo, then the final cutoff voltage of your battery is: the value you set *6.
5. BEC Voltage
This item is for adjusting the output voltage of the BEC from 5V to 8V (it’s 7.4V by default).
6. Response Time
This item is for adjusting the throttle respond, the higher the value, the slower the throttle response.
In the “Fixed-wing” mode, this item is adjustable between 0 and 5 (and it will be 5 even if you set it to any value between 5 and 21).
In the “Helicopter (Linear Throttle/External Governor)” mode, this item will turn into “Soft Start-up Enabled/Disabled”, select “0” is to disable the“Soft Start-up” function and select “any value between 1 and 21” is is to enable the
“Soft Start-up” function.
In the “Helicopter (Elf Governor)” or “Helicopter (Store Governor) mode, this item is adjustable from 5 and 21 with the step of 1 (it will be 5 even if you set it to any value between 0 and 5), it’s 15 by default (we recommend using the
default setting).
7. Governor Parameter P
This item is for controlling the ESC compensate the amount of the motor speed during the process of maintaining the speed-governing effect; the higher the value, the bigger the amount; and vice versa. This function functions together
with the Governor Parameter I.
8. Governor Parameter I
This item is for adjusting the response speed of the “Governor Parameter P”. The higher the value, the slower the response speed; and vice versa.
9. Auto Restart Time
This function is effective only in the “Helicopter (Elf Governor)” mode and the “Helicopter (Store Governor)” mode. When moving the throttle stick from above 40% to any position between 25% and 40% and then back to above 40%
within the preset time period, the motor will skip over the soft start-up process, start up and accelerate to the speed (in the programmed Restart Acceleration Time) corresponds to the current throttle amount rapidly, complete the
shutdown and restart up. When the throttle amount is below 25%, or keep the throttle stick at any position between 25% and 40% for more than the preset time (Auto Restart Time), the “Restart Acceleration Time” will be void.
In that case, the motor will start up in the default way in the “Helicopter (Elf Governor)” mode and the “Helicopter (Store Governor)” mode when moving the throttle stick to above 40%.
10. Restart Acceleration Time
This item is adjustable between 1s and 3s with the step of 0.5s, it’s 1.5s by default. It controls the time the motor needs for starting from standstill and accelerating to the full speed when you want to rapidly restart the motor during the
preset “Auto Restart Time”. (Note: it is an auxiliary function to the “Auto Restart Time”, it only effects in the condition that “Auto Restart Time” is effective.
11. Brake Type
• Normal Brake: after selecting this option, if you move the throttle stick to the bottom position, then the ESC will brake the motor as per the preset brake force.
• Proportional Brake: after selecting this option, the throttle range on the transmitter is between 20% and 100%, the corresponding ESC throttle output is between 0% and 100%.When the throttle range on the transmitter is between
20% and 0%, the corresponding brake force is between 0 and 100%.
12. Brake Force
This item is for only effective in the “Normal Brake” mode. When moving the throttle stick to the bottom position, it controls the brake speed (it’s the speed that motor comes to a standstill from rotation). The higher the value, the more
powerful the brake force and the shorter the time (from rotation to standstill) .
13. Timing
This item is for adjusting the ESC timing, it’s adjustable between 0 and 30° with the step of 1° (it’s 15° by default).
14. Motor Rotation
This item is for setting the rotation direction of the motor, it’s “CW” by default. After connecting the motor to the ESC, (if the motor rotates clockwise); when setting this item to “CCW”, the motor will rotates counterclockwise;
(if the motor rotates counterclockwise), when setting this item to “CCW”, the motor will rotates clockwise.
15. DEO Technology/Freewheeling
This item can be enabled or disabled when the “Flight Mode” is set to the “Fixed-wing” or “Helicopter (External Governor) mode; it’s fixed at “Enabled” when the “Flight Mode” is set to the “Helicopter (Elf Governor)” or
“Helicopter (Store Governor)” mode. With this item enabled, the throttle linearity will be great.
16. Start-up Force
This item is for adjusting the start-up force of the motor (during the start-up process). The higher the value, the larger the start-up force. It’s adjustable between 1 and 7 (and it’s 3 by default).
Establish the “Motor RPM-Throttle Amount Curve” via the speed standardization, and then set the throttle amount to some fixed value on the transmitter, in that condition, the motor will output the RPM corresponds to the
throttle amount and keep rotating at that speed.
• In the “Helicopter (Elf Governor)” mode, the ESC won’t save the “Motor RPM-Throttle” curve after it’s disconnected from the battery, so every time the ESC is connected to the battery, it will standardize the speed, otherwise
you cannot use the speed-governing function normally. In this mode, due to the differences like batteries’ different discharge capacity, the standardized RPM is a little different every time. In consequence, at the same throttle
amount, the RPM may be a bit different when using different batteries, but this won’t affect the speed-governing effect.
• In the “Helicopter (Store Governor)” mode, the ESC will save the “Motor RPM-Throttle” curve after the speed standardization. So after adjusting to this mode from any other mode, you need to standardize the speed when the
ESC is connected to the battery for the first time and you needn’t standardize the speed again after disconnecting the ESC from the battery first and then connecting it to the battery again. If adjusting to any other mode from
this mode and saving the “Motor RPM-Throttle” curve, and then adjusting back to this mode, the “Motor RPM-Throttle” curve saved by the ESC will be cleared, and you need to standardize the speed once again. If your ESC
remains in this mode in future, then it will always carry out its operation as per the saved “Motor RPM-Throttle” curve. When standardize the speed for the first time, we recommend using a battery in good condition. After the
RPM standardization, change another battery with the same number of cells to fly your aircraft. At the same throttle amount, the RPM should be consistent with the RPM of the first flight.
1) Theory of RPM Standardization
During the RPM standardization, the ESC will establish a “Motor RPM-Throttle” curve by itself based on the actual battery voltage and the actual KV rating of the motor. Therefore ,
you need to standardize the speed with a fully charged battery, and ensure the main blade pitch is 0° (in order to make the helicopter not take off).
In general, people use the default “Throttle Curve & Pitch Curve” of the transmitter (as shown below) when they standardize the speed.
Attention! Please ensure the main blade pitch is 0° and the throttle amount is above 40% (we recommend using 50%) when standardizing the speed.
2) Procedures of RPM Standardization
• We recommend using the default “Throttle Curve & Pitch Curve”. (If you don’t want to use the default setting, then please ensure the throttle amount is 50% and the main blade
pitch is 0° when the motor rotates.
• Turn on the transmitter, move the throttle stick to the bottom position and then wait for the ESC completing the self detection.
• If you’ve set the “throttle cut” function, please lock the “throttle cut”, and then move the throttle stick to the 50% position and then unlock the “throttle cut”. If there is no
“throttle cut”, then you can move the throttle stick to the 50% position directly.
• The ESC drives the motor to rotate, the main blades start to accelerate slowly (because the main blade pitch is 0°, so the helicopter won’t take off, but you still needs to be careful),
you need to wait for the acceleration completing and the speed getting stable, and then lock the “throttle cut” or move the throttle stick to the bottom position.
• The ESC will stop driving the motor, the main blades start to slow down and then stop rotating.
• The RPM standardization completes.
Attention! Please calibrate the throttle range before the RPM standardization. There will be no need if you’ve carried out the ESC/Radio Calibration when the first
time you used this ESC or you didn’t restore the settings to factory defaults after the calibration (changing the transmitter & receiver is an exception).
Formula: Main Blades’ RPM (at the 100% throttle)=Max. RPM÷ (Motor Poles ÷2)÷Drive Gear Ratio
The Main Blades’ RPM (at the 100% throttle) in the example is: 157*1000÷(10÷2)÷(120÷13) 3400 RPM If the Main Blades’ RPM needs to remain at 2700RPM during the 3D flight process, then you need to set the throttle ≈
amount (set in the Helicopter “Store Governor” mode) to 2700÷3400 0.8, that is you need to set the throttle amount to 80%. At this time, you need to set the value of the 3D throttle curve (i.e. IDLE1) to 80%≈
(as shown in Figure 2):So next time, when you fly your helicopter, let it take off in the “Normal” mode first and then switch to the “IDLE1” mode directly, then your helicopter can starts the 3D flight with 80% throttle amount
(that’s the standardized speed of 2700 RPM).
Notes: in general, you can set and save 2/3 sets of throttle curve IDLE settings on a high quality transmitter (and you need to adjust the main blade pitch of each set of IDLE setting as per the actual demand), and switch between
these settings during the flight and have the different throttle amount (set in the Helicopter “Store Governor” mode) to meet the different RPM demands (i.e. when setting IDLE1 to 70%, IDLE2 to 80%, IDLE3 to 90% in the way
as explained earlier, then you will have three different throttle amounts (set in the Helicopter “Store Governor” mode) to meet different flight demands.
2. In the “ ” mode, you are not allowed to check the Max. RPM, so you need to set the transmitter in advance and check the main blades’ RPM with the help of some external device (like RPM viewer) and Helicopter (Elf Governor)
then decide the throttle amount you need to set. Here you can calculate the throttle amount roughly. For example, if the KV rating of the motor is 480KV, the battery is a 12S LiPo, the motor drive gear is 13T and the main drive
gear is 110T, then the main blades’ RPM is: KV Rating × Battery Voltage ÷Drive Gear Ratio (480*12*4.2*13÷110 2850). So if you want your motor to rotate at the speed of 2150RPM, then the throttle mount is: 2150÷2850≈ ≈
0.75 (that is 75%), and then you adjust it accordingly as per your preference or the data you read on the RPM viewer.
• In “ ” mode, connect the ESC to the LCD program box or WIFI Express module when the RPM standardization Helicopter (Store Governor)
completes, and then find the record ( ) as per the instruction about the “ data checking” process.as shown in Figure 1
The value shown in the image is just an example, pleas take the value actually displayed on your LCD program box as standard. This value is
the max. electrical RPM the motor can reach at the 100% throttle.
• Take a helicopter with single reduction gear unit as an example, with the motor poles is 10, the motor drive gear is 13T and the main drive
gear is 120T (that the drive gear ratio is 9.3), then you can get the main blades’ RPM at the 100% throttle.
1. In “ ” mode, you can check the standardized speed (Max. RPM) and needn’t standardize the speed every time when the ESC is connected to the battery as in the “Helicopter (Elf Governor)” mode, Helicopter (Store Governor)
so it’s more convenient. We recommend using this mode in the condition that you’re using fixed motor, drive gear ratio and battery (with same cell count). In this mode, only if the drive gear ratio is accurate, the main blades’
RPM \ corresponds to the throttle amount (set in the Helicopter “Store Governor” mode) you will get will be accurate as well. About how to “set the speed-governing function” in this mode, let’s take an example .
2. Protections
• Power-on Abnormal Voltage Protection
The ESC will measure the input voltage when it’s connected to a battery or power supply. If the input voltage is not within the regulated range, it will take the voltage as an abnormal voltage and then activate the protection, flash Red
LED and beep a series of beeps.
• Start-up Protection:
The ESC will monitor the motor speed (RPM) during the start-up process. When the speed stops increasing or the speed increase is not stable, the ESC will take it as a start-up failure. At that time, if the throttle amount is less than 15%,
then the ESC will automatically try to restart up; if it is larger than 20%, then you need to move the throttle stick back to the bottom position and then restart up the ESC. (Possible causes of this problem: poor connection/ disconnection
between the ESC and motor wires, propellers are blocked, etc.)
• ESC Thermal Protection:
The ESC will gradually reduce the output but won’t cut it off completely when the ESC temperature goes above 110 . For ensuring the motor can still get some power and won’t cause crashes, so the maximum reduction is about 50% of
the full power. The ESC will gradually resume its maximum power after the temperature lowers down. In addition, the ESC temperature cannot exceed 70 when it’s powered on. Otherwise, it cannot be started up but flashes Blue LED
and beeps a series of beeps to indicate the ESC temperature is too high. (Here we are describing the ESC’s reaction in the “Soft Cutoff” mode, while if in the “Hard Cutoff” mode; it will immediately cut off the power.)
• Throttle Signal Loss Protection:
When the ESC detects loss of signal for over 0.25 second, it will cut off the output immediately to avoid an even greater loss which may be caused by the continuous high-speed rotation of propeller. The ESC will resume the
corresponding output after normal signals are received.
• Overload Protection:
The ESC will cut off the power/output and automatically restart itself when the load suddenly increases to a very high value. If the load still remains high or the motor still remains out of sync, then it will completely cut off the power/output.
• Low-voltage Cutoff Protection
When the operating voltage goes below the preset cutoff voltage, the ESC will gradually reduce the output but won’t cut it off completely. For ensuring the motor can still get sufficient power to land the aircraft safely, so the maximum
reduction is about 50% of the full power. You need to change another fully charged battery to resume the operation when the low-voltage cutoff protection is activated.
• Over-current Protection
During use, the ESC will cut off the output immediately if the current exceeds the regulated value and then resume it quickly; the ESC will cut off the output completely and won’t resume it if the regulated value is exceeded again.
RPM Standardization
2
How to Set the Speed-governing Function
3
Model
Cont./Peak Current
Input Voltage
BEC
Input / Output Wires
Separate Programming Port
LED Indicator
Size / Weight
Application
200A/300A
6-14S LiPo
Black & Red 8AWG input wires / Black 10AWG output wires
For connecting LCD Program Box or WIFI Express or powering an External Cooling Fan
For indicating the running status and possible troubles of the ESC
105x50x36mm / 325g
700-800 Class electric Helicopter (Main Blades: 690-800mm), electric fixed-wing, multi-rotor
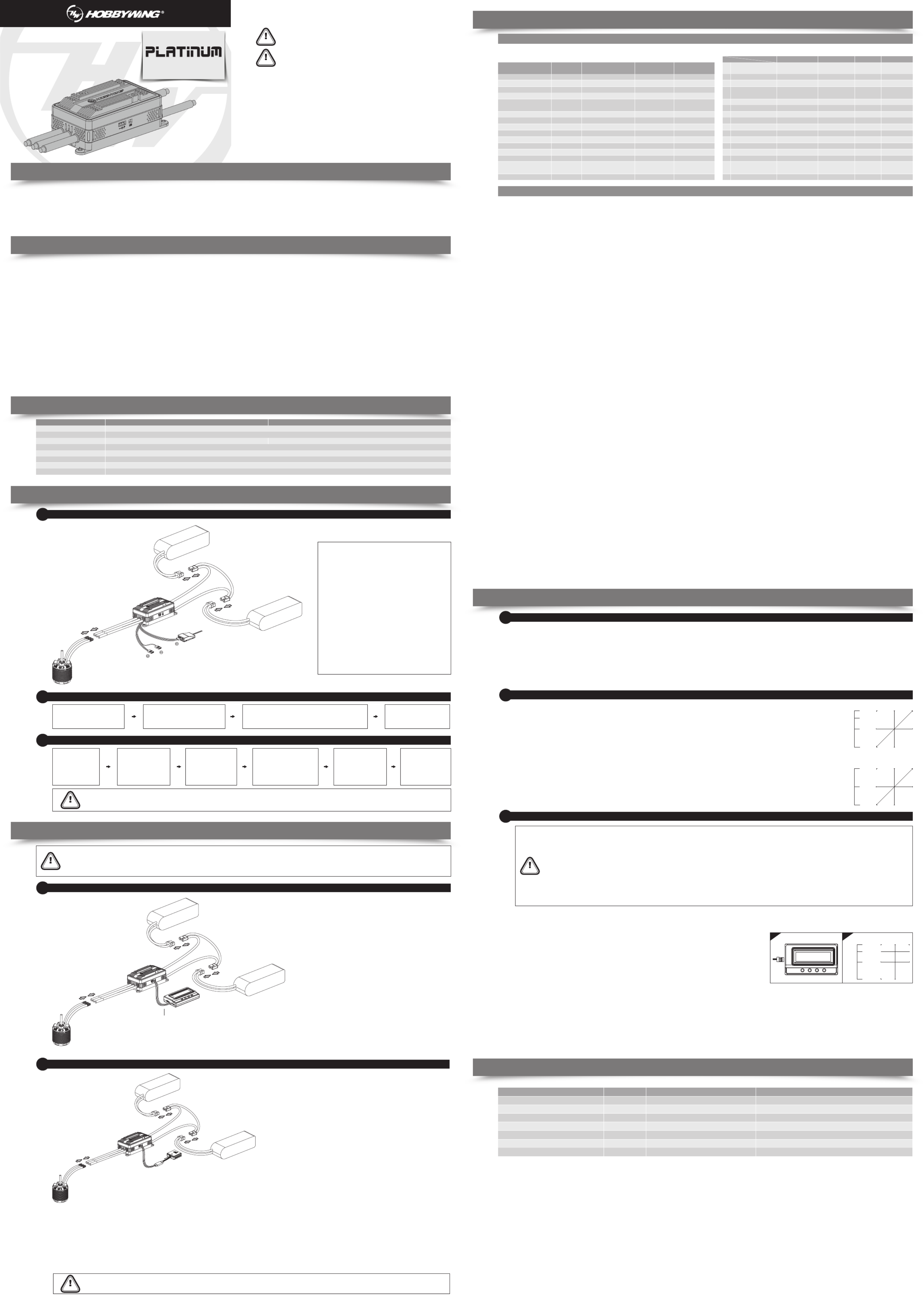
Platinum 200A HV SBEC V4.1
Switch-mode, 5-8V Adjustable, Cont./Peak : 10A/30A
Platinum 200A HV OPTO V4.1
No BEC
① BEC Output Wire (Red/Brown): plug this extra BEC output
wire into the special battery channel or any unoccupied
channel on the receiver. (Note: for better BEC powering
effect, under the condition that the Flybarless system permits,
we recommend plugging the BEC wire into the special
battery channel or any unoccupied channel on the Flybarless
system. The Platinum 200A HV OPTO V4.1 ESC doesn’t have
this wire.)
② RPM Signal Wire (Yellow): plug it into the RPM input channel
on the Flybarless system. (This wire can be used for providing
RPM signal input when using external device for
speed-governing.)
③ Throttle Signal Cable (White/Red/Black): plug it into the TH
throttle on the receiver or the corresponding channel on the
Flybarless system. About which channel you should plug it in,
it depends on the receiver type and the Flybarless system
type. The White wire is for transmitting throttle signals, the
Red & Black wires are connected to the output end of the
internal BEC in parallel (that is they are BEC output wire and
ground wire).
ESC/Radio Calibration
3
Program Your ESC with a Multifunction LCD Program Box
1
Program Your ESC with a WIFI Express (Item sold separately)
2
Turn on the
transmitter and move
the throttle stick to
the top position.
Connect a battery to
the ESC; the motor will
sound “ 123” to ♪
indicate the ESC is
powered on normally.
•
The throttle range of the ESC is from 1100µs to 1940µs by default. You need to re-calibrate the throttle range when the first time you use this ESC or after you change the transmitter.
•
During the ESC/Radio calibration, please set the throttle curve to NORMAL and ensure the corresponding throttle amounts to the maximum throttle endpoint and the minimum throttle
endpoint on your transmitter are respectively 100% and 0%.
5 seconds later, the
motor will beep two
short beeps to indicate
the maximum throttle
position is accepted.
Move the throttle stick to the
bottom position after you
hear those two beeps, the
minimum throttle position will
be accepted 1 second later.
The Motor will beep
“Number” short beeps
to indicate the number
of LiPo cells you have
plugged in.
The motor will beep a
long beep to indicate
the calibration is
complete.
AT T ENT ION
•
The parameters of this ESC are programmable, you can adjust relevant parameter settings to meet different flight demands.
•
The ESC will record relevant data like the standardized speed (it can only be checked and won’t disappear when the ESC is disconnected from the pack in “Helicopter (Store Governor)” mode ), the
minimum voltage, and the maximum temperature of the current flight. Therefore, if you want to check the relevant data after the flight, please keep the ESC connected to the pack and then
connect the LCD program box or WIFI Express module to the ESC to check the data. Those data won’t be stored after the pack is disconnected from the ESC.
1. ESC Programming
• Connect the LCD program box to the ESC as shown above, and then connect the battery
to the ESC.
• Press the “OK” button (on the program box) to connect the program box to your ESC, the
firmware version of the ESC will be displayed on the screen of the program box after the
connection succeeds.
• After successfully entering the “Parameters/Programmable Items” page, press the “ITEM”
button (on the program box) to browse the parameter(s) and then press the “VALUE”
button to adjust the parameter value(s).
• Press the “OK” button to save the new value(s) to your ESC after adjusting.
• Repeat “step 3” and “step 4” will allow you to adjust the value(s) of other parameter(s).
• After the programming, disconnect the ESC from the battery, unplug the cable for
connecting the program box to the ESC, and then power the ESC off and then back on
will allow you to run your system with those new parameter settings.
Attention! You need to power the ESC off and then back on after adjusting
parameter settings, otherwise, the new values won’t come into effect.
2. Check the Running Data of Your ESC
• (With the battery connected to the ESC), connect the LCD program box to the ESC as
shown above.
• Press the “OK” button (on the program box) to connect the program box to your ESC, the
firmware version of the ESC will be displayed on the screen of the program box after the
connection succeeds.
• Press the “R/P” button to enter the “Data Record” page after successfully entering the
“Parameters/Programmable Items” page, continue to press the “R/P” button to browse all
the running data of your ESC.
1. ESC Programming
• Connect the ESC to the WIFI Express module as shown above, and then connect the battery to the ESC.
• Open the WIFI setting on your smart phone and then connect (the phone to) the WIFI Express module
(the WIFI name is HW-WIFILINK and the password is 12345678 by default, you can change them by
yourself).
• After the connection succeeds, open the “HW Link” APP on your phone (the APP needs to be installed in
advance), click the “connect to ESC” icon (in the upper right corner), and then you can adjust parameter
values, check the running data of the ESC, or carry out other operations.
• After successfully saving the new value(s) to your ESC, disconnect the ESC from the “HW Link” APP,
unplug the WIFI Express module, and then power the ESC off and then back on will allow you to run
your system with those new parameter settings.
2. Data Checking
• (With the battery connected to the ESC), connect the ESC to the WIFI Express module as shown above.
• Open the WIFI setting on your smart phone and then connect (the phone to) the WIFI Express module
(the WIFI name is HW-WIFILINK and the password is 12345678 by default, you can change them by
yourself).
• After the connection succeeds, open the “HW Link” APP on your phone (the APP needs to be installed in
advance), click the “connect to ESC” icon (in the upper right corner), and then click the “Data Record”
icon and “Aircraft” to check the recorded data.
AT T ENT ION
•
The best throttle amount (set in the Helicopter “Store Governor” mode) of the ESC ranges from 70% to 90%, so please try to set the throttle amount (set in the Helicopter “Store
Governor” mode) within this range. A low throttle amount (set in the Helicopter “Store Governor” mode) will make the ESC always function inefficiently; while a high throttle amount (set
in the Helicopter “Store Governor” mode) will leave the ESC a very small compensation space, then compensation insufficiency issue may happen and cause (speed decrease) problem when
the load is high. In that case, we recommend changing the motor or drive gear ratio (you need to re-standardize the speed after you change the motor or drive gear ratio).
•
In the “Helicopter (Store Governor)” mode, if fly your aircraft with a low performance battery after standardizing the speed with a high performance battery may cause damage to the low
performance battery.
•
In “Helicopter (Store Governor)” mode, different battery packs can bring the same stable RPM only if they have the same cell count. This won’t change even when you change the battery
pack. However, battery packs with different cell count don’t have the same effect. For instance, in “Helicopter (Store Governor)” mode, you can`t use a 4S to calibrate the motor RPM and
then use a 6S to drive the motor, hoping it can run at the same RPM.
•
You can decide the control feel via adjusting Governor Parameter P/I. In “Helicopter (Store Governor) or Helicopter (Elf Governor)” mode, connect your ESC to a smart phone or PC, then you
can check the “throttle vs speed” chart.
AT T ENT ION
Throttle value
100% +100%
-100%
80%
50%
0
Throttle curve
Max RPM
157x1000 RPM
01 02
Throt tle v alue
100% +100%
-100%
50%
0
Throt tle curve
Max Pitch +
Max Pitch -
Pitch+
Pitch-
+100%
-100%
0° 0
Pitch curve
Programmable Parameters
Explanations for Programmable Parameters
1. Warning Tones
AT T ENT ION
After adjusting parameters, you need to power your ESC off and then on. Otherwise, those new parameters won’t take effect.
Platinum HV 200A SBEC V4.1
Motor
Battery
Battery
Connecting your ESC to a multifunction LCD program box
via the extra 3 pin cable (with JR male connectors at
both ends) by referring to corresponding marks
("-+s" & "ESC") on the ESC and the program box.
Platinum HV 200A SBEC V4.1
Motor
Battery
Battery
Platinum HV 200A SBEC V4.1
Motor
Battery
Battery
WIFI Express
• High performance 32-bit microprocessor with the running frequency of up to 72MHz for excellent performance. The microprocessor powered by the separate voltage-regulating IC, which features great anti-interference performance,
greatly reduces the possibility of losing control.
• Separate switch-mode voltage-regulating BEC with adjustable voltage of 5-8V and continuous/peak current of 10A/30A. The BEC is separated from other circuits, its normal output will be guaranteed to protect your aircraft from crash
when issues like the power board of the ESC is burnt occur.
• Special BEC (Battery Eliminator Circuitry), which can prevent voltage from flowing backward in operation, can be connected to a backup battery in parallel.
• DEO (Driving Efficiency Optimization) technology or Freewheeling for smoother throttle response, higher driving efficiency and lower ESC temperature.
• Four flight modes: Fixed-wing, Helicopter (External Governor), Helicopter (Elf Gover nor), and Helicopter (Store Governor).
• Soft start-up in the three Helicopter modes.
• Throttle response time is adjustable. You can adjust the response time when using big-sized motors & propellers to protect your ESC.
• Helicopter speed-governing function, which features adjustable “Governor Parameter P/I”, is easy to use. It can guarantee the stable rotation of main blades when the load changes dramatically.
• Auto Restart Time allows you to interrupt the shutdown and landing during the preset time and restart the motor promptly to avoid crash caused by improper operation.
• LED indicator for indicating the running status and possible troubles of the ESC.
• Data Logging can record the minimum voltage, the maximum temperature, the maximum current and the standardized RPM of the current flight and output the running data of the ESC in real time (HOBBYWING WIFI Express module,
HW Link mobile phone APP are needed).
• RPM Signal Output port for outputting the electrical RPM of the motor (calculated in 2 poles) in real time.
• Separate programming port for connecting HOBBYWING LCD program box or WIFI Express module or powering an external cooling fan.
• ESC programming, firmware upgrade, and data checking via HOBBYWING WIFI Express module, HW Link mobile phone APP allows you to program your ESC, upgrade its firmware and check relevant data wirelessly
(HOBBYWING WIFI Express module is needed).
• Real-time data checking for checking the running data of your ESC in real time via HOBBYWING WIFI Express module, HW Link mobile phone APP.
• Online data checking, ESC programming, firmware upgrade are supported (HOBBYWING LCD program box & PC or WIFI Express module & Smartphone are needed).
• Multiple protections like start-up protection, ESC thermal protection, capacitor thermal protection, over-current protection, overload protection, and throttle signal loss protection.
3. Real-time Data Checking
• (With the battery connected to the ESC), connect the ESC to the WIFI Express module as shown above.
• Open the WIFI setting on your smart phone and then connect (the phone to) the WIFI Express module (the WIFI name is HW-WIFILINK and the password is 12345678 by default, you can change them by yourself).
• After the connection succeeds, open the “HW Link” APP on your phone (the APP needs to be installed in advance), do not click the “connect to ESC” icon (in the upper right corner) but directly click the “Data Record” icon to
enter the “Data Record” Page.
• After entering the “Data Record” page, click “Aircraft” and then “Real-time Data” to enter the “Real-time Data” page, fill in the gear ratio (if it’s not applicable, then fill in 1) and the pole pairs of the motor (that’s to halve the
motor poles), and then click “OK”.
• The ESC will transmit the real-time data to the “Real-time Data” page when it starts to function, you can check the data on that page.
Product specificaties
| Merk: | Hobbywing |
| Categorie: | Radiografisch bestuurbaar speelgoed |
| Model: | Platinum Pro 200A HV |
| Kleur van het product: | Zwart |
| Gewicht: | 325 g |
| Breedte: | 105 mm |
| Diepte: | 50 mm |
| Hoogte: | 36 mm |
| Soort: | Radio-Controlled (RC) Model Parts |
| Materiaal behuizing: | Aluminium |
| Merkcompatibiliteit: | Hobbywing |
| Aantal: | 1 |
| Compatibele batterij technologiën: | Lithium-Polymeer (LiPo) |
| Maximale continue stroom: | 200 A |
| Type product: | ESC |
| AWG draad omvang: | 8 |
| Type elektronische toerentalregeling (ESC): | Borstelloos |
| Batterij elaminatorcircuit (BEC) continue stroom: | 10 A |
| Maximaal aantal cellen compatibele batterij: | 14 |
| Batterij elaminatorcircuit (BEC) uitgangsstroom: | 5 V, 8 V |
| Draadlengte: | 0.15 mm |
| Burststroom Battery Eliminator Circuit (BEC): | 30 A |
| Maximale reeks stroom: | 300 A |
| Compatibele batterijcellen minimumaantal: | 6 |
Heb je hulp nodig?
Als je hulp nodig hebt met Hobbywing Platinum Pro 200A HV stel dan hieronder een vraag en andere gebruikers zullen je antwoorden
Handleiding Radiografisch bestuurbaar speelgoed Hobbywing

29 Maart 2025
29 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
Handleiding Radiografisch bestuurbaar speelgoed
- Radiografisch bestuurbaar speelgoed Absima
- Radiografisch bestuurbaar speelgoed ACME
- Radiografisch bestuurbaar speelgoed Amewi
- Radiografisch bestuurbaar speelgoed Blade
- Radiografisch bestuurbaar speelgoed DJI
- Radiografisch bestuurbaar speelgoed Futaba
- Radiografisch bestuurbaar speelgoed Graupner
- Radiografisch bestuurbaar speelgoed Little Tikes
- Radiografisch bestuurbaar speelgoed MJX
- Radiografisch bestuurbaar speelgoed Multiplex
- Radiografisch bestuurbaar speelgoed Parrot
- Radiografisch bestuurbaar speelgoed Proline
- Radiografisch bestuurbaar speelgoed Reely
- Radiografisch bestuurbaar speelgoed Revell
- Radiografisch bestuurbaar speelgoed Robbe
- Radiografisch bestuurbaar speelgoed SAB
- Radiografisch bestuurbaar speelgoed Sharper Image
- Radiografisch bestuurbaar speelgoed Spektrum
- Radiografisch bestuurbaar speelgoed TacTic
- Radiografisch bestuurbaar speelgoed Tamiya
- Radiografisch bestuurbaar speelgoed Velleman
- Radiografisch bestuurbaar speelgoed WLtoys
- Radiografisch bestuurbaar speelgoed JR
- Radiografisch bestuurbaar speelgoed Overmax
- Radiografisch bestuurbaar speelgoed Conrad
- Radiografisch bestuurbaar speelgoed Chicco
- Radiografisch bestuurbaar speelgoed Carrera
- Radiografisch bestuurbaar speelgoed Biltema
- Radiografisch bestuurbaar speelgoed Lenoxx
- Radiografisch bestuurbaar speelgoed Carson
- Radiografisch bestuurbaar speelgoed Ninco
- Radiografisch bestuurbaar speelgoed Traxxas
- Radiografisch bestuurbaar speelgoed ARRMA
- Radiografisch bestuurbaar speelgoed Spin Master
- Radiografisch bestuurbaar speelgoed ParkZone
- Radiografisch bestuurbaar speelgoed JETI
- Radiografisch bestuurbaar speelgoed SkyRC
- Radiografisch bestuurbaar speelgoed LRP
- Radiografisch bestuurbaar speelgoed Ripmax
- Radiografisch bestuurbaar speelgoed Maverick
- Radiografisch bestuurbaar speelgoed Axial
- Radiografisch bestuurbaar speelgoed Hangar 9
- Radiografisch bestuurbaar speelgoed FMS
- Radiografisch bestuurbaar speelgoed E-flite
- Radiografisch bestuurbaar speelgoed Flyzone
- Radiografisch bestuurbaar speelgoed Losi
- Radiografisch bestuurbaar speelgoed XciteRC
- Radiografisch bestuurbaar speelgoed FrSky
- Radiografisch bestuurbaar speelgoed Force Engine
- Radiografisch bestuurbaar speelgoed Vaterra
- Radiografisch bestuurbaar speelgoed Jada
- Radiografisch bestuurbaar speelgoed HPI Racing
- Radiografisch bestuurbaar speelgoed Kyosho
- Radiografisch bestuurbaar speelgoed PowerBox Systems
- Radiografisch bestuurbaar speelgoed Hobby Zone
- Radiografisch bestuurbaar speelgoed RC4WD
- Radiografisch bestuurbaar speelgoed Sky Rider
- Radiografisch bestuurbaar speelgoed DF-Models
- Radiografisch bestuurbaar speelgoed ROCHOBBY
Nieuwste handleidingen voor Radiografisch bestuurbaar speelgoed
31 Maart 2025
30 Maart 2025
30 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025