Hobbywing Xrotor Micro Handleiding
Hobbywing
Radiografisch bestuurbaar speelgoed
Xrotor Micro
Lees hieronder de 📖 handleiding in het Nederlandse voor Hobbywing Xrotor Micro (1 pagina's) in de categorie Radiografisch bestuurbaar speelgoed. Deze handleiding was nuttig voor 125 personen en werd door 2 gebruikers gemiddeld met 4.5 sterren beoordeeld
Pagina 1/1
Thank you for purchasing this HOBBYWING product! Please read this
declaration carefully before use, once you start to use, we will assume that
you have read and agreed with all the content. Brushless power systems can
be very dangerous and any improper use may cause personal injury and
damage to the product and related devices, so please strictly follow the
instruction during installation and use. Because we have no control over the
use, installation, or maintenance of this product, no liability may be
assumed for any damage or losses resulting from the use of the product. We
do not assume responsibility for any losses caused by unauthorized
modifications to our product. Besides, we have the right to modify our
product design, appearance, features and usage requirements without
notification. We, HOBBYWING, are only responsible for our product cost and
nothing else as result of using our product. Regarding the possible semantic
difference between two different versions of declaration, for users in
mainland China, please take the Chinese version as standard; for users in
other regions, please take the English version as standard.
Attention!
1. This is an extremely powerful brushless motor system. We strongly recommend removing your propellers for your own safety and the safety of those around you before performing
calibration and programming functions with this system.
2. Available throttle calibration range is from 1000us to 2000us, and the difference between minimum and maximum throttle must be more than 140us (70us in bidirectional mode). If a
calibration is done where the difference is less than 140us (70us), the maximum will be shifted so that the difference is 140us (70us).
3. Oneshot125 mode works just the same as regular 1-2ms mode, the only difference is that all timing is divided by 8. And the same for Oneshot42, where all timing is further divided
by 3. Multshot also works similarly, except the input signal range is 5-25us.
4. Dshot is supported at any rate, up to at least Dshot1200. When the input signal is Dshot, throttle calibration is disabled, and the throttle calibration values are ignored.
5. Input signal rates up to at least 32kHz are supported. But please note that higher input signal rates put a heavier load on the MCU, and will reduce the maximum ERPM that the ESC
can handle.
At this point throttle calibration values are stored. You may remove power from the ESC, or just continue running your ESC.
• Read through the manuals of all power devices and aircraft and ensure the power configuration is rational before using this unit, as improper power configuration will overload the
motor and damage the unit.
• When installing this unit, relevant operations like soldering, connecting will be needed, so please ensure all wires and connections are well insulated before connecting the unit to
related devices, as short circuit will damage the unit. When soldering relevant wires of the unit, please use a soldering iron with sufficient power to do the job, as poor connection may
cause your aircraft to lose control or other unpredictable issues like damage to the device.
• Always keep your aircraft away from unsafe elements like obstacles, crowd, high-voltage power lines. Please fly your aircraft in the working environment as regulated in this manual.
Although there are some protections, improper use may still cause permanent damage to the product.
• Always disconnect and remove batteries after use, as the ESC may drive the motor to rotate and cause unpredictable danger if it`s still connected to the battery. Long-time contact will
cause the battery to completely discharge and result in damage to the battery or/and the ESC. This will not be covered under warranty.
• The open source ESC can only be flashed with the corresponding firmware (not any other firmware) when flashing or upgrading firmware, otherwise it may cause the ESC to stop
working or even damage the chip inside.
• This user manual is based on the operation manual for BLHeli_32 ARM rev32.x and only for reference. For more detailed information, please refer to the original BLHeli manual. Due to
firmware update or other reasons, the descriptions for functions may differ, so please always take the official BLHeli manual as standard.
• Please note that this product is only applicable to the multi-rotors with the diagonal wheelbase doesn’t exceed 300mm, because using it beyond the specification may cause damage to
the ESC or other issues. In that case, users need to take full responsibility for the consequences.
Model
XRotor Micro 60A BLHeli_32 4in1 DShot1200
Cont. Current
60A
Peak Current
80A
BEC
5V@0.6A
LiPo Cells
3-6S
Weight
15g
Size
52x42x6.6mm
Mounting Hole
30.5x30.5mm
1. Rampup Power:
Rampup power can be set to relative values from 3% to 150%. This is the maximum power that is allowed when ramping up at low RPMs and during start-up. For low RPMs, the maximum power to the
motor is limited, in order to facilitate detection of low BEMF voltages. Rampup power also affects bidirectional operation, as the parameter is used to limit the power applied during direction reversal.
During startup, the actual applied power depends on throttle input, and can be lower than the maximum level set by the rampup power parameter, but the minimum level is a quarter of the maximum level.
2. Temperature Protection:
Temperature protection can be enabled or disabled. And the temperature threshold can be programmed. The programmable threshold is primarily meant as a support for hardware manufacturers to use,
as different hardware can have different tolerances on the max temperatures of the various components used.
3. Low RPM Power Protection:
Power limiting for low RPMs can be enabled or disabled. Disabling it can be necessary in order to achieve full power on some low KV motors running on a low supply voltage. However, disabling it
increases the risk of sync loss, with the possibility of toasting motor or ESC.
4. Low Voltage Protection:
Low voltage protection can be set between 2.5V and 4.0V per LiPo cell. Or it can be disabled. When enabled, it will limit power applied to the motor if the battery voltage drops below the programmed
threshold. This feature is primarily intended for fixed wing crafts.
5. Current Protection:
Current protection can be enabled to limit current. If enabled, then current will be limited to maximum the programmed value. The reaction time of the current limiting is quite fast, so current will also
be limited during accelerations.
The value given for current protection, is per ESC. So if setting limit to e.g. 40A for each of the ESCs in a quad (using BLHeliSuite32), then the total current limit for the four ESCs will be 160A.
6. Motor Direction:
Motor direction can be set to fwd / rev / bidirectional / bidirectional rev.
In bidirectional mode, center throttle is zero and above is fwd rotation and below is reverse rotation. When bidirectional operation is selected, throttle calibration is disabled.
7. Demag Compensation:
Demag compensation is a feature to protect from motor stalls caused by long winding demagnetization time after commutation. The typical symptom is motor stop or stutter upon quick throttle
increase, particularly when running at a low RPM. As mentioned above, setting high commutation timing normally helps, but at the cost of efficiency.
Demag compensation is an alternative way of combating the issue. First of all, it detects when a demag situation occurs.
-In this situation, there is no info on motor timing, and commutation proceeds blindly with a predicted timing.
-In addition to this, motor power is cut off some time before the next commutation.
A metric is calculated that indicates how severe the demag situation is. The more severe the situation, the more power is cut off.
When demag compensation is set to off, power is never cut.
When setting it to low or high, power is cut. For a high setting, power is cut more aggressively.
Generally, a higher value of the compensation parameter gives better protection.
If demag compensation is set too high, maximum power can be somewhat reduced for some motors.
8. Motor Timing:
Motor timing can be set between approximately 10 and approximately 310 in approximately 10 increments (actual accurate values here are 15/16ths of a degree).
Typically a medium setting will work fine, but if the motor stutters it can be beneficial to increase timing. Some motors with high inductance can have a very long commutation demagnetization time.
This can result in motor stop or stutter upon quick throttle increase, particularly when running at a low RPM. Setting timing higher will allow more time for demagnetization, and often helps.
This parameter can also be set to auto. In this case the code monitors demagnetization time, and keeps timing as low as possible without having issues with demag. On well behaved motors, timing can
be low in the entire power range, and thereby max power can be reduced. On not so well behaved motors, timing is increased as needed, and thereby improves margins against sync loss.
9. Maximum Acceleration:
Maximum acceleration can be set between 0.1%/ms and 25.5%/ms. It can also be set to maximum, in which case acceleration is not limited. Limiting acceleration is primarily intended as a backup
parameter that can be used in cases where too hard acceleration gives desyncs.
When setting to e.g. 10%/ms, it means that the power applied to the motor is not allowed to increase by more than 10% per millisecond.
10. Throttle Cal Enable:
If disabled, throttle calibration is disabled.
11. Minimum Throttle, Maximum Throttle and Center Throttle:
These settings set the throttle range of the ESC. Center throttle is only used for bidirectional operation. The values given for these settings are for a normal 1000us to 2000us input signal, and for the
other input signals, the values must be scaled.
For Dshot input signal, these settings have no effect.
12. Brake On Stop:
Brake on stop can be set between 1% and 100%, or disabled. When not disabled, the given brake force will be applied when throttle is zero. For nonzero throttle, this setting has no effect. This feature
is primarily intended for fixed wing crafts with folding props.
On some ESCs this setting is not linearly programmable, it will just be enabled (at 100% force for any setting 1%-100%) or disabled (this applies to ESCs that have “EN/PWM” style fet drivers).
13. LED Control:
LEDs can be controlled on ESCs that support it. Up to 4 LEDs can be turned on or off.
14. Beep Strength:
Sets the strength of beeps under normal operation.
15. Beacon Strength:
Sets the strength of beeps when beeping beacon beeps. The ESC will start beeping beacon beeps if the throttle signal has been zero for a given time. Note that setting a high beacon strength can
cause hot motors or ESCs!
16. Beacon Delay:
Beacon delay sets the delay before beacon beeping starts.
17. PWM frequency:
Motor PWM frequency can be programmed between 16kHz and 48kHz. Higher PWM frequency can run motors smoother. Programmable frequency also allows for moving of small but potentially
disturbing bumps in the throttle response. All ESCs have these bumps, with BLHeli_32 they can be moved in the RPM range, to a place where the system has low sensitivity to them.
CA UT IONS
AT T ENT ION
USER MANUAL
Multi-Rotor
XRotor Micro 60A BLHeli 32 4in1 DShot1200
Brushless Electronic Speed Controller
01
Disclaimer
02
Warnings
03
Features
04
Specifications
05
User Guide
ESC/Radio Calibration
3
Once
1. Power up:
Once
2. Throttle signal detected
(arming sequence start):
Once
7. Throttle up detected
(arming sequence start):
Once
8. Zero throttle detected
(arming sequence end):
While
measuring
3. When throttle is above midstick (meauring max throttle):
While
measuring
5. When throttle is below midstick (measuring min throttle):
Once
4. If throttle is above midstick for 3 seconds:
This beep sequence indicates that max throttle has been stored
Once
6. If throttle is below midstick for 3 seconds:
This beep sequence indicates that min throttle has been stored
06
Programming parameters
07
Others
• High performance 32-bit microprocessor with the running frequency of up to 48MHz for excellent performance.
• BLHeli_32 firmware is the third generation BLHeli, following base BLHeli and BLHeli-S.
• All codes use damped light mode. Damped light does regenerative braking, causing very fast motor retardation, and inherently also does active freewheeling.
• The code supports features to prevent sync loss. There are tunable parameters that can make the code run well even in the most demanding situations, although default settings will work
excellently in normal operating environments.
• The code supports regular 1-2ms pulse width input, as well as Oneshot125 (125-250us), Oneshot42 (41.7-83.3us) and Multishot (5-25us).
• Dshot signaling is supported at any rate up to at least Dshot1200. The input signal is automatically detected by the ESC upon power up.
• The code also supports a beacon functionality, where the ESC will start beeping after a given time of zero throttle. This can be very useful for finding lost crafts.
• On board 5V BEC , powering different accessories such as FC , VTx ,Camera and LED lights and etc.
Normal Start-up Process
2
Once
1. Power up:
Once
2. Throttle up detected
(arming sequence start):
Once
3. Zero throttle detected
(arming sequence end):
After this, the motor will run.
1. Thermal Protection
The ESC measures temperature within the MCU and limits motor power if the temperature is too high. Motor power is limited over a range:
-If the temperature is above the threshold, motor power begins to be limited.
-If the temperature is above the threshold plus approximately 150 , motor power is limited to 25%. ℃
Motor power is not limited below 25%.
2. Stall Protection
If the motor has attempted to start but not succeeded for a few seconds, it will stop attempting and wait for throttle to be zeroed before attempting again.
3. Beacon---Beeps
If the ESC is armed and sees zero throttle for a given time, it beeps beacon beeps, which are approximately one beep per three seconds.
4. Not activated ESC---Beeps
All ESCs shall be activated during manufacturing. If for some reason this is not done, the ESC will beep like this upon power up, before the normal operation beep sequence starts: “B, B, B… (the time
interval shortens gradually)”. If for some reason activation has failed and the ESC is not regarded as a valid BLHeli_32 unit, the ESC will beep like this upon power up, before the normal operation beep
sequence starts: “BBB, BBB, BBB…(the tone of the “BBB” changes from high to low)”. In this case the ESC will only accept 1-2ms pwm input signal.
5. Other Relevant Information
BLHeli official website: https://github.com/bitdump/BLHeli
BLHeli32 official documentation download website: https://github.com/bitdump/BLHeli/tree/master/BLHeli_32%20ARM
Firmware: Hobbywing_XRotor_BLHeli32...
2019031 9
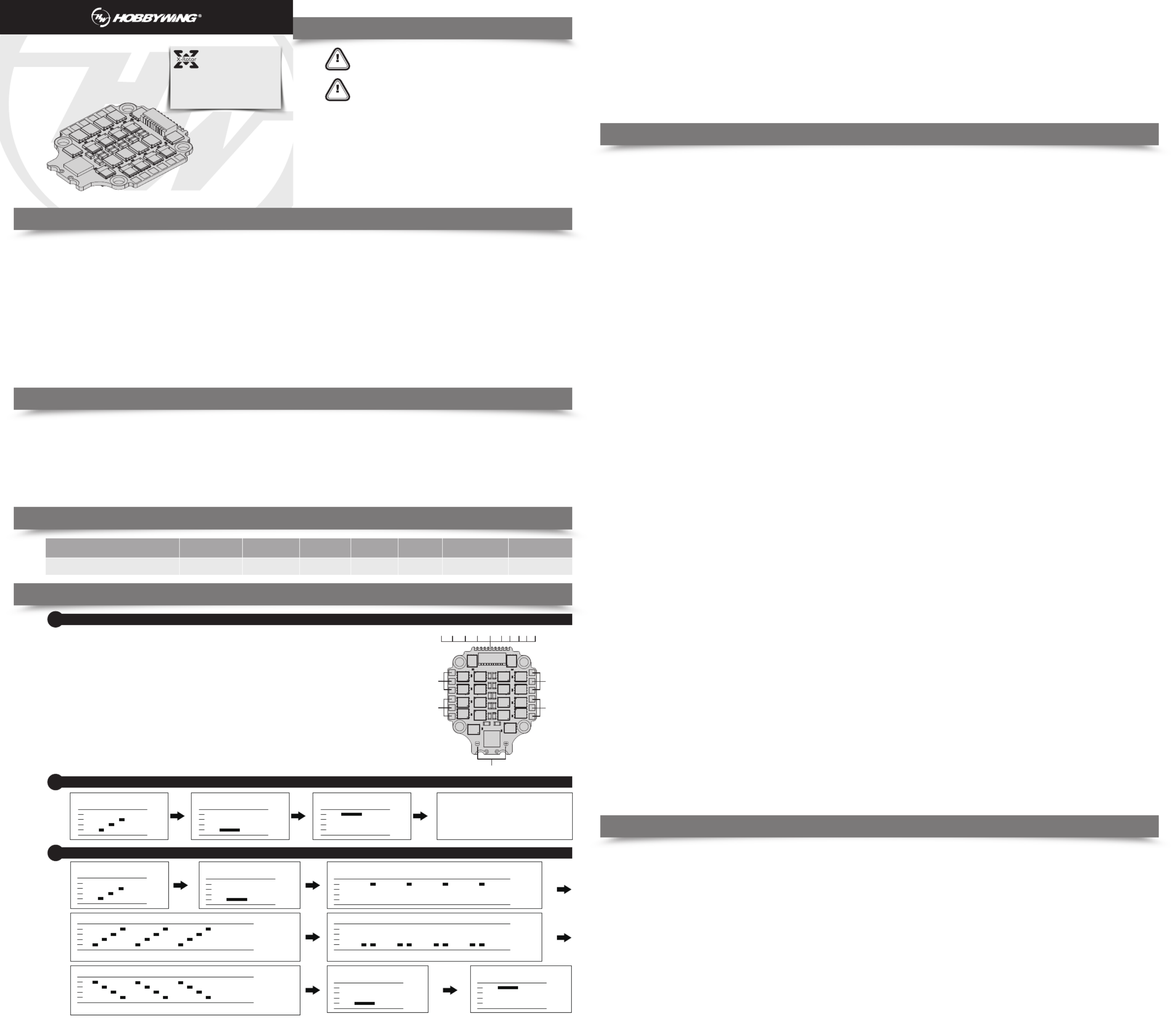
Definitions for Different Ports
1
Note: Users only need to connect the throttle control wire, 5V power wire and ground wire of the
ESC to the corresponding ports (on peripheral devices like receiver) when a single ESC needs to be
programmed.
• NC: none output.
• BAT:Battery Volt monitoring port with the battery voltage is to connect to the Battery Volt monitoring port
on flight controller.
• CTR:Amp monitoring port with the amperage of 11.75mv/A is to connect to the Amp monitoring port on
flight controller.
• GND:Ground wire.
• 5V Power output port . (For FC , Camera , 5V LED light and etc .)5V:
• S1-4:Throttle Signal Input Ports. Port S1 is for ESC M1, S2 is for M2, S3 is for M3, and S4 is for M4.
• POWER INPUT:Power input soldering point , “-” for connecting the power wire - , “+” for connecting the
power wire +.
M2
M1
Power Input
M4
NC GND BAT GNDCRT 5V S1 S2 S3 S4
M3
Product specificaties
| Merk: | Hobbywing |
| Categorie: | Radiografisch bestuurbaar speelgoed |
| Model: | Xrotor Micro |
| Kleur van het product: | Black, Blue |
| Gewicht: | 15 g |
| Breedte: | 52 mm |
| Diepte: | 42 mm |
| Hoogte: | 6.6 mm |
| Soort: | Radio-Controlled (RC) Model Parts |
| Correct gebruik: | Multikopter |
| Merkcompatibiliteit: | Hobbywing |
| Aantal: | 1 |
| Compatibele batterij technologiën: | Lithium-Polymeer (LiPo) |
| Type product: | Snelheidsregelaar |
| AWG draad omvang: | 12 |
| Aansluiting type: | XT60 |
| Batterij elaminatorcircuit (BEC) continue stroom: | 0.6 A |
| Batterij elaminatorcircuit (BEC) uitgangsstroom: | 5 V |
| Rotatie directie: | Links/rechts |
Heb je hulp nodig?
Als je hulp nodig hebt met Hobbywing Xrotor Micro stel dan hieronder een vraag en andere gebruikers zullen je antwoorden
Handleiding Radiografisch bestuurbaar speelgoed Hobbywing

29 Maart 2025
29 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
27 Maart 2025
Handleiding Radiografisch bestuurbaar speelgoed
- Radiografisch bestuurbaar speelgoed Absima
- Radiografisch bestuurbaar speelgoed ACME
- Radiografisch bestuurbaar speelgoed Amewi
- Radiografisch bestuurbaar speelgoed Blade
- Radiografisch bestuurbaar speelgoed DJI
- Radiografisch bestuurbaar speelgoed Futaba
- Radiografisch bestuurbaar speelgoed Graupner
- Radiografisch bestuurbaar speelgoed Little Tikes
- Radiografisch bestuurbaar speelgoed MJX
- Radiografisch bestuurbaar speelgoed Multiplex
- Radiografisch bestuurbaar speelgoed Parrot
- Radiografisch bestuurbaar speelgoed Proline
- Radiografisch bestuurbaar speelgoed Reely
- Radiografisch bestuurbaar speelgoed Revell
- Radiografisch bestuurbaar speelgoed Robbe
- Radiografisch bestuurbaar speelgoed SAB
- Radiografisch bestuurbaar speelgoed Sharper Image
- Radiografisch bestuurbaar speelgoed Spektrum
- Radiografisch bestuurbaar speelgoed TacTic
- Radiografisch bestuurbaar speelgoed Tamiya
- Radiografisch bestuurbaar speelgoed Velleman
- Radiografisch bestuurbaar speelgoed WLtoys
- Radiografisch bestuurbaar speelgoed JR
- Radiografisch bestuurbaar speelgoed Overmax
- Radiografisch bestuurbaar speelgoed Conrad
- Radiografisch bestuurbaar speelgoed Chicco
- Radiografisch bestuurbaar speelgoed Carrera
- Radiografisch bestuurbaar speelgoed Biltema
- Radiografisch bestuurbaar speelgoed Lenoxx
- Radiografisch bestuurbaar speelgoed Carson
- Radiografisch bestuurbaar speelgoed Ninco
- Radiografisch bestuurbaar speelgoed Traxxas
- Radiografisch bestuurbaar speelgoed ARRMA
- Radiografisch bestuurbaar speelgoed Spin Master
- Radiografisch bestuurbaar speelgoed ParkZone
- Radiografisch bestuurbaar speelgoed JETI
- Radiografisch bestuurbaar speelgoed SkyRC
- Radiografisch bestuurbaar speelgoed LRP
- Radiografisch bestuurbaar speelgoed Ripmax
- Radiografisch bestuurbaar speelgoed Maverick
- Radiografisch bestuurbaar speelgoed Axial
- Radiografisch bestuurbaar speelgoed Hangar 9
- Radiografisch bestuurbaar speelgoed FMS
- Radiografisch bestuurbaar speelgoed E-flite
- Radiografisch bestuurbaar speelgoed Flyzone
- Radiografisch bestuurbaar speelgoed Losi
- Radiografisch bestuurbaar speelgoed XciteRC
- Radiografisch bestuurbaar speelgoed FrSky
- Radiografisch bestuurbaar speelgoed Force Engine
- Radiografisch bestuurbaar speelgoed Vaterra
- Radiografisch bestuurbaar speelgoed Jada
- Radiografisch bestuurbaar speelgoed HPI Racing
- Radiografisch bestuurbaar speelgoed Kyosho
- Radiografisch bestuurbaar speelgoed PowerBox Systems
- Radiografisch bestuurbaar speelgoed Hobby Zone
- Radiografisch bestuurbaar speelgoed RC4WD
- Radiografisch bestuurbaar speelgoed Sky Rider
- Radiografisch bestuurbaar speelgoed DF-Models
- Radiografisch bestuurbaar speelgoed ROCHOBBY
Nieuwste handleidingen voor Radiografisch bestuurbaar speelgoed
31 Maart 2025
30 Maart 2025
30 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025
29 Maart 2025