Microchip PIC32MX120F032D Handleiding
Microchip Niet gecategoriseerd PIC32MX120F032D
Bekijk gratis de handleiding van Microchip PIC32MX120F032D (84 pagina’s), behorend tot de categorie Niet gecategoriseerd. Deze gids werd als nuttig beoordeeld door 34 mensen en kreeg gemiddeld 4.8 sterren uit 8 reviews. Heb je een vraag over Microchip PIC32MX120F032D of wil je andere gebruikers van dit product iets vragen? Stel een vraag
Pagina 1/84
2007-2021 Microchip Technology Inc.DS60001145AA-page 1
PIC32
1.0DEVICE OVERVIEW
This document defines the Flash programming
specification for the PIC32 family of 32-bit
microcontrollers.
This programming specification is designed to guide
developers of external programmer tools. Customers
who are developing applications for PIC32 devices
should use development tools that already provide
support for device programming.
The major topics of discussion include:
•Section 1.0 “Device Overview”
•Section 2.0 “Programming Overview”
•Section 3.0 “Programming Steps”
•Section 4.0 “Connecting to the Device”
•Section 5.0 “EJTAG vs. ICSP”
•Section 6.0 “Pseudo Operations”
•Section 7.0 “Entering 2-Wire Enhanced ICSP
Mode”
•Section 8.0 “Check Device Status”
•Section 9.0 “Erasing the Device”
•Section 10.0 “Entering Serial Execution Mode”
•Section 11.0 “Downloading the Programming
Executive (PE)”
•Section 12.0 “Downloading a Data Block”
•Section 13.0 “Initiating a Page Erase”
•Section 14.0 “Initiating a Flash Row Write”
•Section “”
•Section 16.0 “Exiting Programming Mode”
•Section 17.0 “The Programming Executive”
•Section 18.0 “Checksum”
•Section 19.0 “Configuration Memory and Device
ID”
•Section 20.0 “TAP Controllers”
•Section 21.0 “AC/DC Characteristics and Timing
Requirements”
•Appendix A: “PIC32 Flash Memory Map”
•Appendix B: “Hex File Format”
•Appendix C: “Device IDs”
•Appendix D: “Revision History”
2.0PROGRAMMING OVERVIEW
When in development of a programming tool, it is
necessary to understand the internal Flash program
operations of the target device and the Special
Function Registers (SFRs) used to control Flash
programming, as these same operations and registers
are used by an external programming tool and its
software. These operations and control registers are
described in the “Flash Program Memory” chapter in
the specific device data sheet, and the related “PIC32
Family Reference Manual”section. It is highly
recommended that these documents be used in
conjunction with this programming specification.
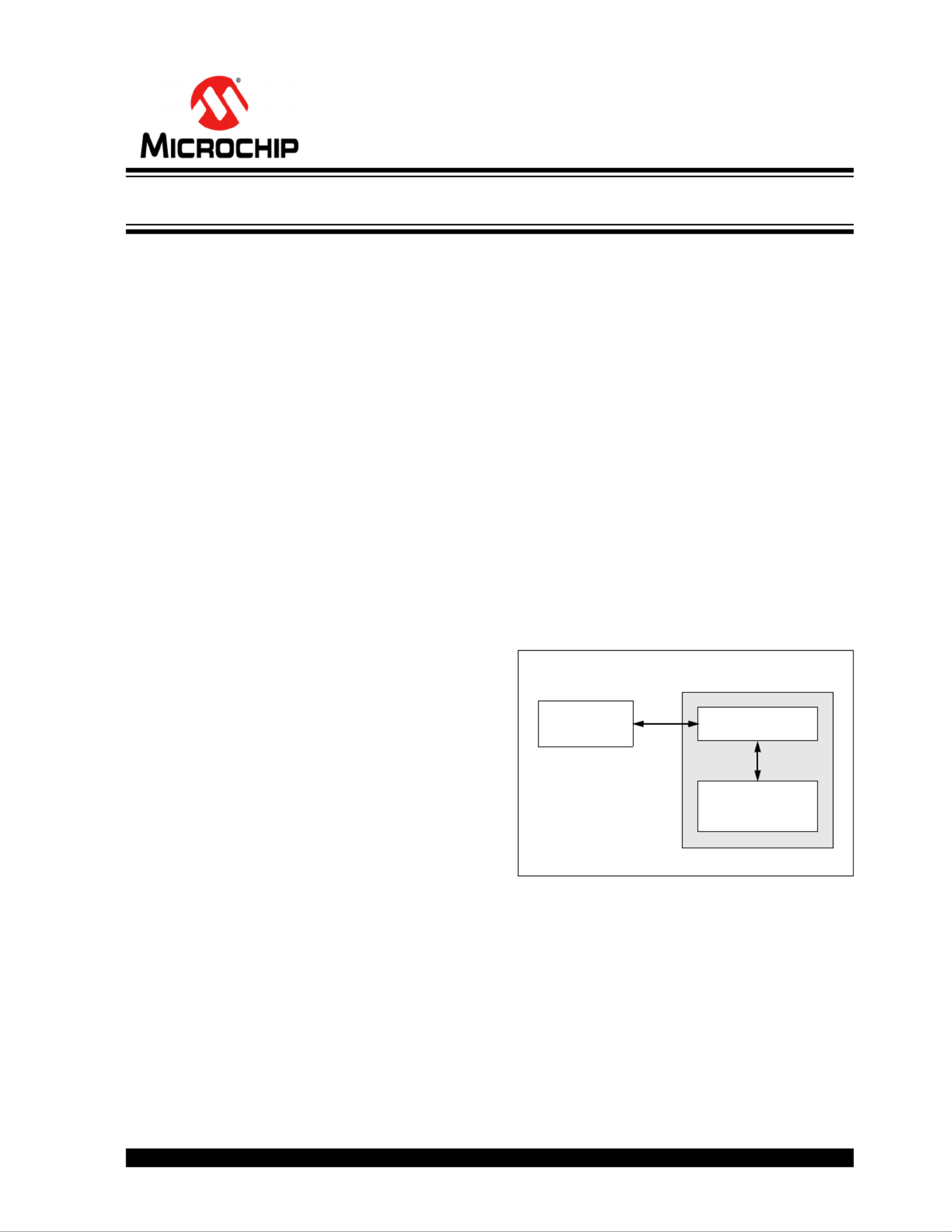
An external tool programming setup consists of an
external programmer tool and a target PIC32 device.
Figure 2-1 illustrates a typical programming setup. The
programmer tool is responsible for executing
necessary programming steps and completing the
programming operation.
FIGURE 2-1:PROGRAMMING SYSTEM
SETUP
Target PIC32 Device
CPU
On-Chip Memory
External
Programmer
PIC32 Flash Programming Specification
Product specificaties
| Merk: | Microchip |
| Categorie: | Niet gecategoriseerd |
| Model: | PIC32MX120F032D |
Heb je hulp nodig?
Als je hulp nodig hebt met Microchip PIC32MX120F032D stel dan hieronder een vraag en andere gebruikers zullen je antwoorden
Handleiding Niet gecategoriseerd Microchip

2 Februari 2026
26 Januari 2026
13 Januari 2026
12 Januari 2026
12 Januari 2026
12 Januari 2026
12 Januari 2026
12 Januari 2026
6 December 2025
5 December 2025
Handleiding Niet gecategoriseerd
Nieuwste handleidingen voor Niet gecategoriseerd
2 Augustus 2026
2 Augustus 2026
2 Augustus 2026
2 Augustus 2026
1 Augustus 2026
31 Juli 2026
31 Juli 2026
31 Juli 2026
31 Juli 2026
31 Juli 2026