Microchip LX4580 Handleiding
Microchip Niet gecategoriseerd LX4580
Bekijk gratis de handleiding van Microchip LX4580 (30 pagina’s), behorend tot de categorie Niet gecategoriseerd. Deze gids werd als nuttig beoordeeld door 116 mensen en kreeg gemiddeld 4.5 sterren uit 8 reviews. Heb je een vraag over Microchip LX4580 of wil je andere gebruikers van dit product iets vragen? Stel een vraag
Pagina 1/30
© 2022 Microchip Technology Inc. LX4580 with SAMV71 MCU Demo User Guide rev 0.1- page 1
LX4580 with Dual SAMV71 MCUs Demo User Guide
1 Description
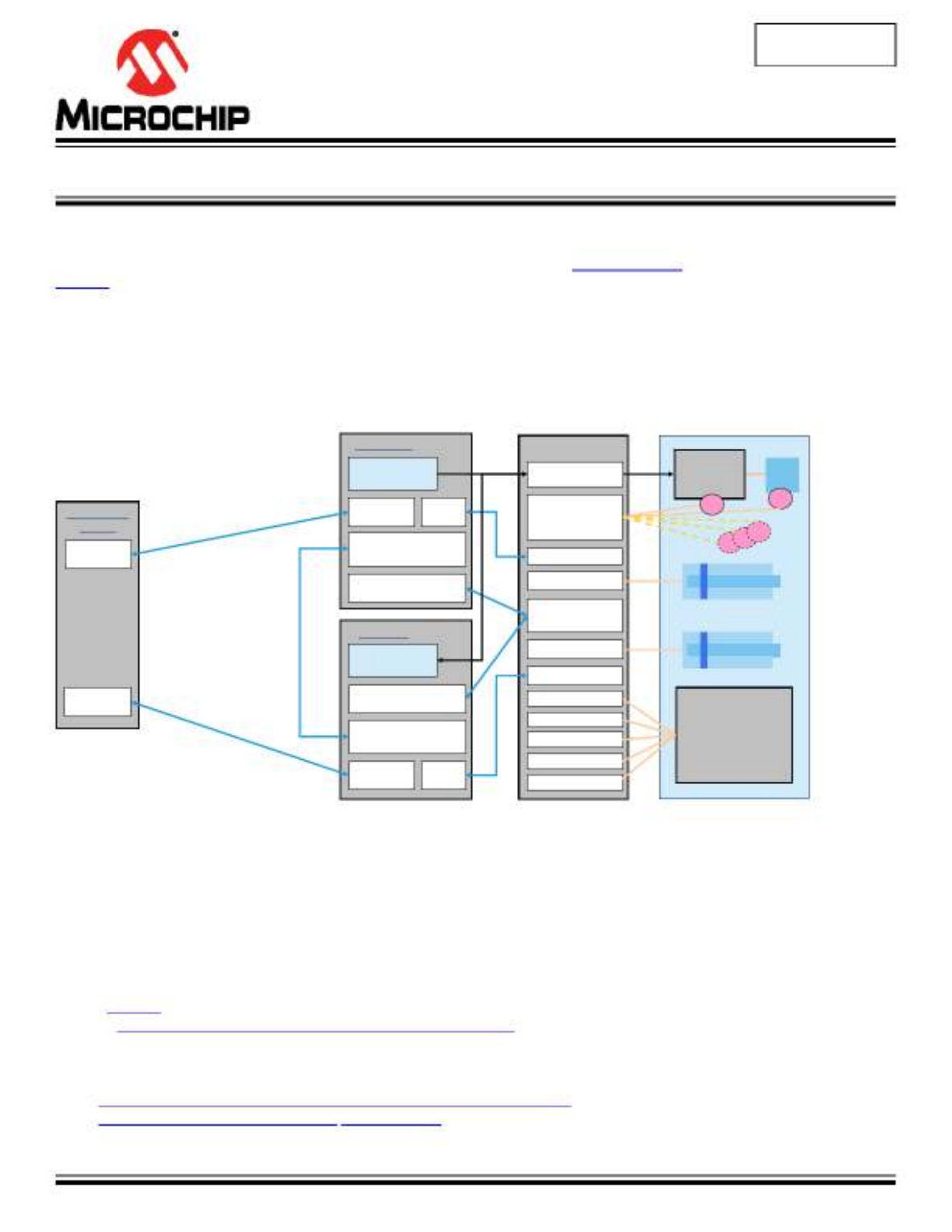
This document describes a demo linear actuator control system using dual ATSAMV71Q21 microcontrollers with an
LX4580 motor acquisition system. The SAMV71 MCUs run the motor control loop and generate motor control signals in a
classic command/monitor (COM/MON) dual-controller redundant control system (Figure 1). The LX4580 manages the
sensors, in this case an LVDT and two temperature sensors. The LX4580 drives the LVDT primary directly, calculates the
RMS of the two LVDT secondaries, and automates temperature sensing based on PT100 or PT1000 remote sensors.
The purpose of this project is to provide practical demonstration source code for a motor position control system using an
LVDT as a position feedback sensor, as the core of a larger control system. The motor drive hardware is simplified by
using an off-the-shelf stepper motor controller, instead of using the LX4580's PWM outputs and current sense inputs.
mainmotor controlinterface
redunda
nt
motorcontrolin
ter f
ace
Redundant
motor control
interface via
MON should
direct COM
interface fail
M
LVDT1
LX4580
COMMAND SAMV71
Host Control
System
T
M
MONITOR SAMV71
COM UART
MON UART
MON UARTSPI I/F
COM to MON
communications I/F
Fault Manager
Fault Manager
COM to MON
communications I/F
COM UARTSPI I/F
SPI2 Interface
LVDT1 Interface
SPI1 Interface
PT100/PT1000
Temperature
Sense Interface
Stepper
Motor
Driver
Motor Position
Control Loop
Motor Position
Loop Checker
T
C
T
3
T
4
T
5
Motor and Actuator
System Control and
Monitoring Circuits
Pressure Sensors,
Position Sensors, Logic
I/O, Voltages, Currents
PWM Engine
3 x 4-20mA Sensor
3 x Hall Sensor
9 x GPIO
5 x Current Sense
LVDT2
Differential ADC I/P
LVDT2 Interface
Reset Input &
Fault Outputs
mainmotor controlinterface
redunda
nt
motorcontrolin
ter f
ace
Redundant
motor control
interface via
MON should
direct COM
interface fail
Figure 1. COM/MON Motor Control System with Dual Processors and Redundant LVDTs
2 Control Loop
The control system is intended to emulate the real, complex dynamics of control surfaces in an airplane. The linear
actuator is elastically coupled to a mass and the LVDT via a compression spring to exhibit substantial difference static and
dynamic friction. The position control loop is therefore 2nd-order to compensate.
3 Demo hardware
The hardware comprises:
•An LX4580 evaluation kit
•Two ATSAMV71-XULT SAMV71 Xplained Ultra evaluation kits, which carry ATSAMV71Q21 MCUs
•A Songhe TB6600 microstepping stepper motor driver. Alternative microstepping drivers with step/direction controls
may be used, set to 8 microsteps (1600 steps per revolution) and 2.5A peak phase current
•A motherboard that the two ATSAMV71-XULT evaluation kits and TB6600 plug onto
•A SainSmart 100mm linear stage actuator with NEMA17 stepper motor, operated at 15V
•A Solartron Metrology model 930982 S series LVDT
•Two PT100 or PT1000 thermistors
•Windows PC to act as system host, with a USB connection to each of the ATSAMV71-XULT boards
Preliminary
Product specificaties
| Merk: | Microchip |
| Categorie: | Niet gecategoriseerd |
| Model: | LX4580 |
Heb je hulp nodig?
Als je hulp nodig hebt met Microchip LX4580 stel dan hieronder een vraag en andere gebruikers zullen je antwoorden
Handleiding Niet gecategoriseerd Microchip

2 Februari 2026
26 Januari 2026
13 Januari 2026
12 Januari 2026
12 Januari 2026
12 Januari 2026
12 Januari 2026
12 Januari 2026
6 December 2025
5 December 2025
Handleiding Niet gecategoriseerd
Nieuwste handleidingen voor Niet gecategoriseerd
18 Juli 2026
18 Juli 2026
18 Juli 2026
18 Juli 2026
18 Juli 2026
18 Juli 2026
17 Juli 2026
17 Juli 2026
17 Juli 2026
17 Juli 2026